[RA-L & IROS 2022] FISS: A Trajectory Planning Framework using Fast Iterative Search and Sampling... NUS Advanced Robotics Centre 6:02 2 years ago 383 Далее Скачать
Talk by Ignacio Vizzo: Make it Dense - Dense Maps from Sparse Point Clouds (RAL-IROS'22) Cyrill Stachniss 6:50 2 years ago 2 407 Далее Скачать
Talk by J. Rückin: Informative Path Planning for Active Learning in Aerial Semantic Map... (IROS'22) Cyrill Stachniss 7:00 2 years ago 866 Далее Скачать
Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry (RAL-IROS 2022) UZH Robotics and Perception Group 6:50 2 years ago 3 401 Далее Скачать
RAL/ICRA2022: MotionBenchMaker: A tool to generate and Benchmark Motion Planning Datasets Constantinos Chamzas 3:53 2 years ago 74 Далее Скачать
IROS 2022 Presentation: Simultaneous Contact-Rich Grasping and Locomotion for Multi-Limbed Robots Yuki Shirai 7:00 2 years ago 361 Далее Скачать
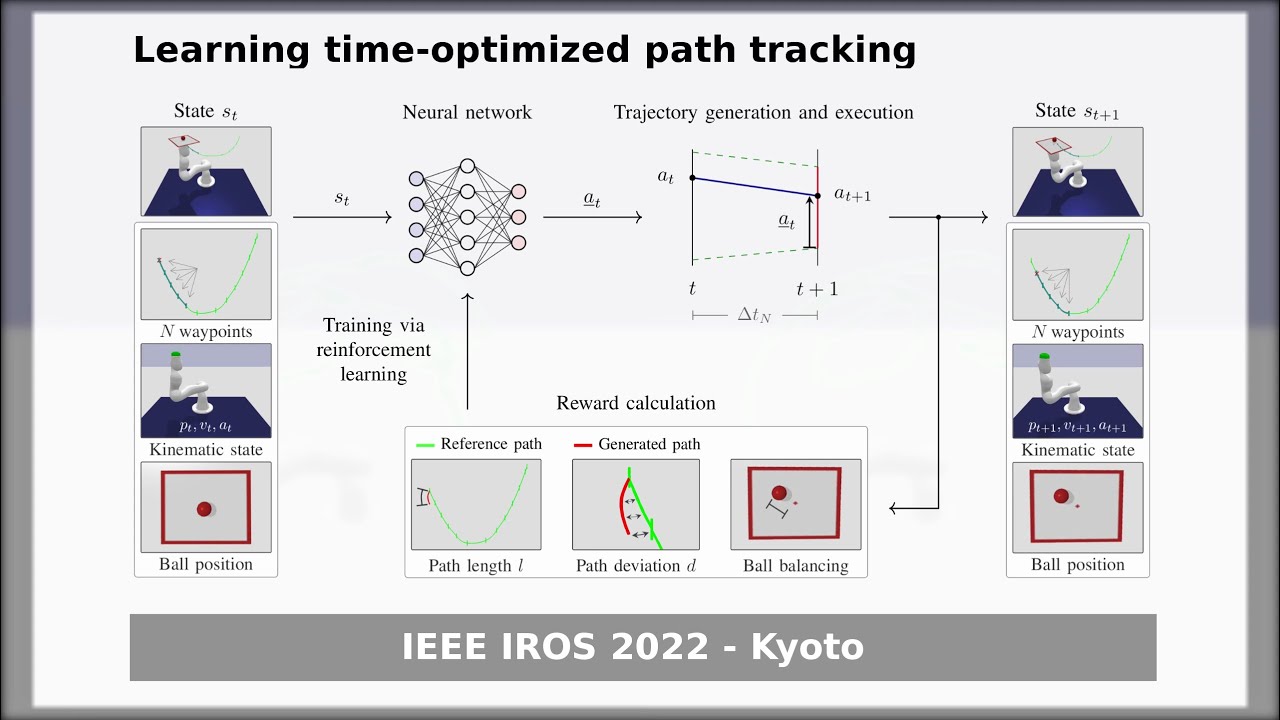
[IROS 2022] Learning Time-optimized Path Tracking with or without Sensory Feedback - Presentation IPR@KIT 7:00 2 years ago 728 Далее Скачать
IROS 2022 - Learning Visual Feedback Control for Dynamic Cloth Folding hietalajulius 0:58 2 years ago 263 Далее Скачать
IROS 2022 - TAPE: Tether-Aware Path Planning for Autonomous Exploration of Unknown Environments Louis Petit 6:55 2 years ago 399 Далее Скачать
Collisions-inclusive Motion Planning -- IEEE/RSJ IROS 2020 Presentation ARCS Lab 13:48 4 years ago 199 Далее Скачать
[IROS 2022] Learning Time-optimized Path Tracking with or without Sensory Feedback IPR@KIT 1:00 2 years ago 207 Далее Скачать
Sequence-of-Constraints MPC: IROS 2022 Presentation Video Marc Toussaint 6:50 2 years ago 401 Далее Скачать
XR-ROB Workshop @ IEEE/RSJ IROS 2022 | Invited Talk by Dr. Helen Oleynikova Vicarios Lab @ IIT 22:41 1 year ago 24 Далее Скачать
IROS 2022 Talk: FAR Planner: Fast, Attemptable Route Planner using Dynamic Visibility Update Ji Zhang 10:05 2 years ago 1 606 Далее Скачать
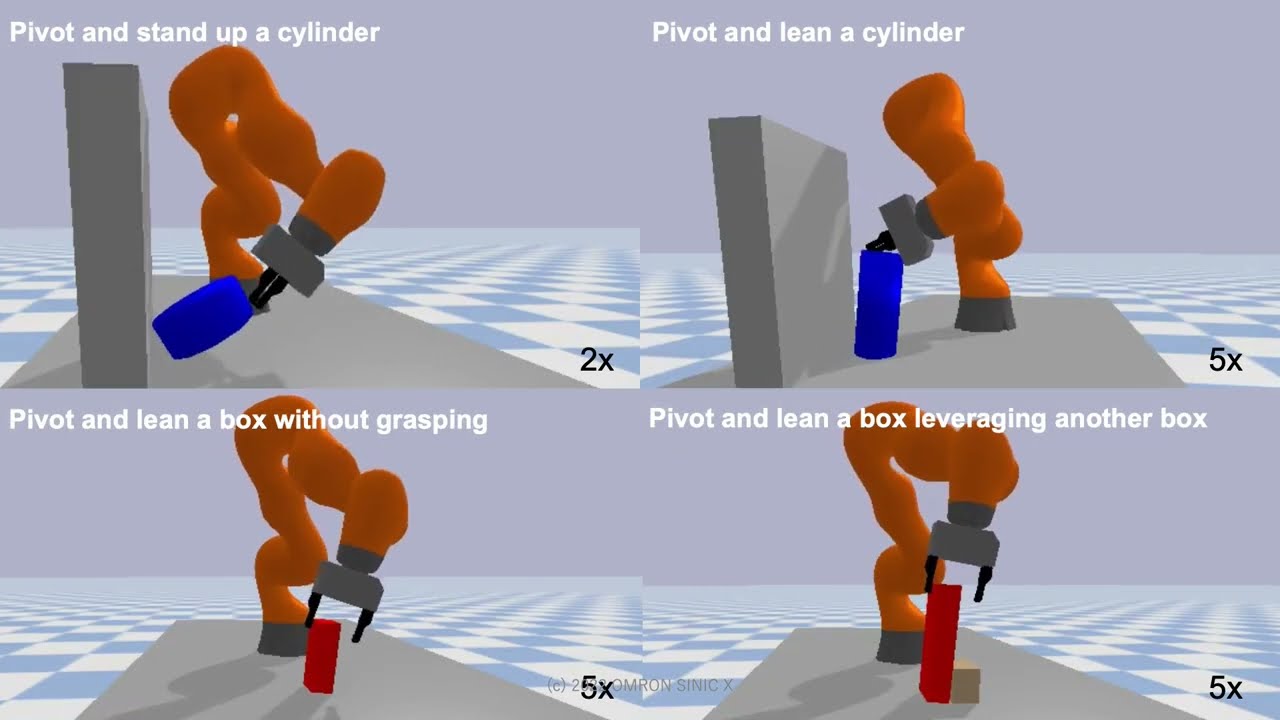
Quasistatic contact-rich manipulation via linear complementarity quadratic programming (IROS 2022) OMRON SINIC X 7:00 2 years ago 338 Далее Скачать
Time-Optimal Online Replanning for Agile Quadrotor Flight (RAL-IROS 2022 talk) UZH Robotics and Perception Group 6:53 2 years ago 2 432 Далее Скачать
Bootstrapping Motor Skill Learning with Motion Planning - IROS2021 Eric Rosen 1:01 3 years ago 281 Далее Скачать
Differentiable Task Assignment and Motion Planning - Supplementary Computational Robotics Lab 4:52 1 year ago 597 Далее Скачать